Jest to sprawdzony projekt znakomitego manipulatora dotykowego, używanego przez wielu telegrafistów na całym świecie. Jego zalety zauważą szczególnie operatorzy QRQ, pozwala on bowiem zaoszczędzić czas zużywany na naciskanie dźwigni, chociaż lekkość i komfort
nadawania docenią zapewne wszyscy nadawcy. Uważam, że wypada on lepiej na tle innych tego typu urządzeń.
Schemat dostałem od Ryszarda SP9DBA, który dostał
go od kolegi z Niemiec, autorem zaś pierwowzoru jest amerykański
krótkofalowiec W8NUE. Schemat jest prosty i opiera
się na dwóch wzmacniaczach operacyjnych - LTC 1043 oraz LMC
6462, dwóch tranzystorach kluczujących i dosłownie kilku
elementach dodatkowych.
To co jest istotne przy jego budowie to:
- dobranie odpowiednich elektrod na "dźwignie" - mogą to
być jakieś płaskowniczki, najlepiej chromowane, gładkie, ewentualnie
zaokrąglone na końcach, a nawet tak jak w moim przypadku klucze od
starego zamka od drzwi ;)
- zadbanie o to żeby przewody łączące piny 2 i 11 układu LTC 1043
z dźwigniami manipulatora były jak najkrótsze i prowadzone z
dala od innych przewodów i masy (ale bez
obawy, wystarczy kilka milimetrów)
- można też dać dodatkowe kondensatory blokujące napięcie blisko
samych pinów układów scalonych (piny 4,6 i 7 układu
LTC 1043, oraz pin 8 LMC 6462), ale nie jest to konieczne, nic złego
nie powinno się dziać
- napięcie zasilania MUSI być stabilizowane, od tego zależy stałość czułości manipulatora
Dokonałem małej zmiany
w gałęzi potencjometru, którym regulujemy czułość.
To ten element którym ustawiamy w jakim momencie zbliżenia palca
do dźwigni lub jej dotknięcia następuje wygenerowanie znaku. Żeby
zakres przestrajania był wygodny i mieścił się między skrajnymi położeniami
potencjometru, za radą Tadzia SP1CVP zmniejszyłem jego wartość do 100k, a odpowiedniej wartości rezystory dałem w szereg do masy oraz plusa zasilania. Można je
obliczyć mierząc napięcia na dźwigniach manipulatora i podstawiając
prawo Ohma, lub po prostu użyć omomierza i zmierzyć jakich
rezystancji potrzeba, żeby uzyskać zadowalający nas zakres. Na moim schemacie (Rys. 2) zostały też usunięte trymery symetrii,
a rezystory dobrane do napięcia 9V. Naturalnie można nic nie zmieniać i
zostać przy wersji pierwotnej, co zresztą polecam przy pierwszym
uruchomieniu manipulatora.
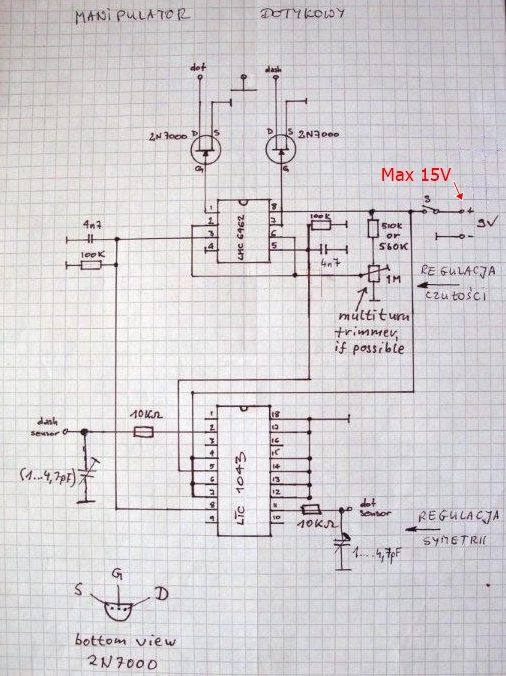
Rys. 1
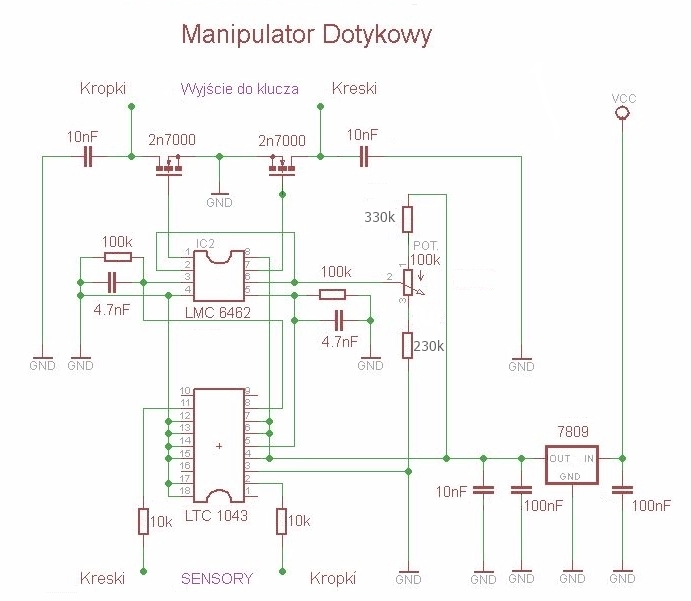
Rys. 2
Jeden z pierwszych egzemplarzy manipulatora zbudowałem dosłownie z tego co było pod ręką ;)
Jako obudowa posłużyło pudełko po kremie Bambino i stara płyta CD. Elektrody to dwa guziki pokryte farbą metalizującą, po środku
widać pokrętło potencjometru czułości:

Działa też nie najgorzej...
Link do filmu
Układ jest na tyle prosty, że można go zmontować na płytce uniwersalnej, a nawet stykowej.
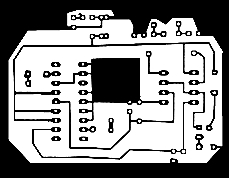
Poniżej zdjęcie
PCB do termotransferu (ok. 60.5mm x 47mm). Należy dać zworkę i
połączyć dwa pola mas wypełnione czarnym kolorem (to w środku i to na
obrzeżach płytki):
Powrót na stronę główną